
















CS機器人撞機卡死處理
1. 簡介
機器人撞機后由于和外部接觸一直反饋一定的扭力,機器人會一直報警不能進行移動和拖動情況下,需要進入反向驅動模式或關閉碰撞檢測。建議優先考慮使用“反向驅動”
反向驅動:反向驅動功能可以用于機器人解除卡死狀態,進入反向驅動模式時,機器人可以直接使用手進行拖動移出碰撞區域。
碰撞檢測:當機器人本體上電外力超過用戶安全設置的正常受力范圍時,機器人本體自動停止,以防機器人或操作人員碰撞受傷。
2. 操作流程
2.1. 電磁抱閘-機器人進入“反向驅動”
● 機器人進入下圖界面,點擊 “打開電源“

● 機器人顯示”待機“狀態后退出,進入運行頁面,切換狀態
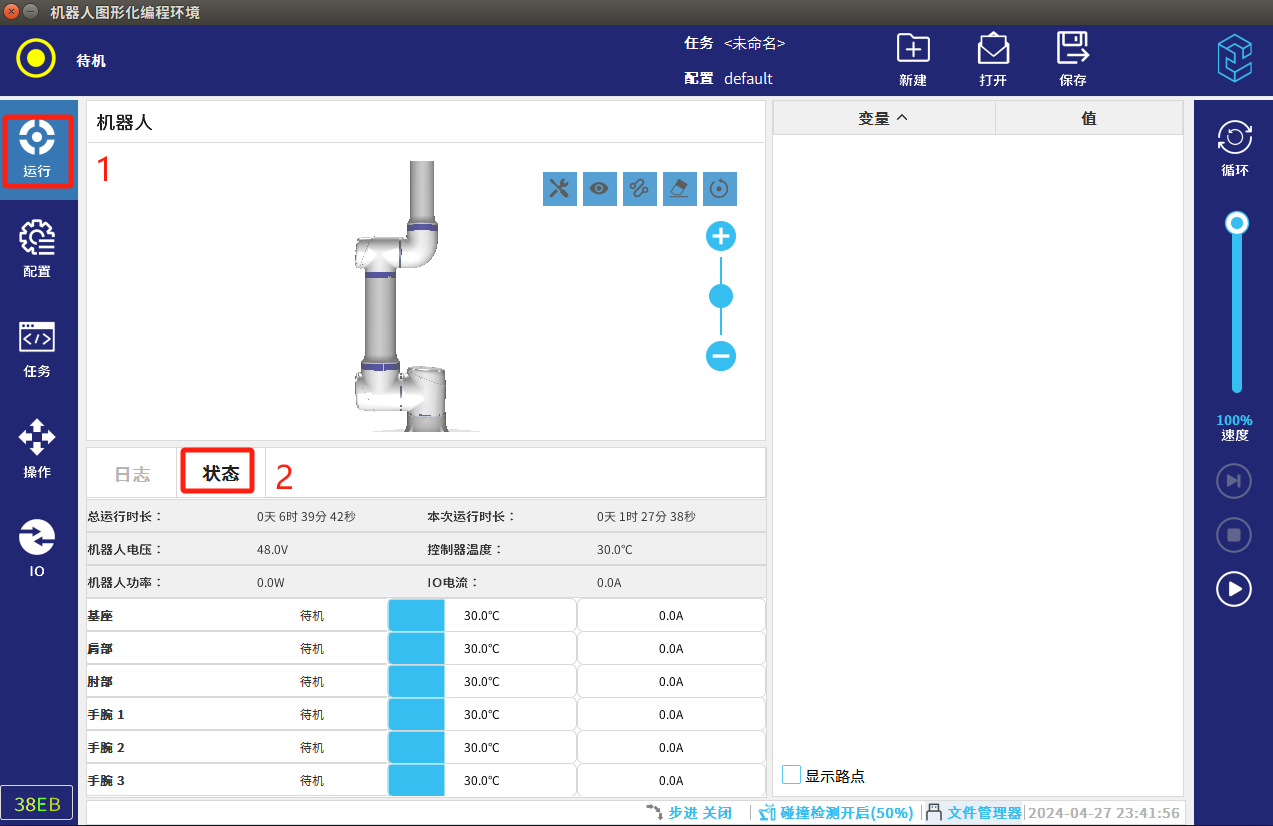
● 按住示教器反面的拖動使能開關,機器人即進入 “反向驅動”模式。點擊開啟對應軸的”反向驅動“,此時關節在重力的作用下會正常下滑,機器人可以直接使用手進行拖動。

● 此時跟進現場情況單獨開啟一個軸或多個軸反向驅動,用手進行拖動將機器手移動到安全區域。松開示教器反面的拖動使能開關,機器手電機抱閘后,再松開機器人本體防止機器臂下滑導致二次傷害。當機器人在安全區域內進入下圖界面,點擊 “釋放抱閘“。等待頁面左上角顯示“正常模式”,機器人可正常使用。

2.2. 插銷抱閘-機器人進入“反向驅動”
● 機器人進入下圖界面,點擊 “打開電源“
● 機器人顯示”待機“狀態后,按住示教器反面的拖動使能開關,機器人即進入 “反向驅動”模式。機器人可以直接使用手進行拖動,當受力達到一定程度后,伺服會自動松開抱閘,并被推動。
● 將機器人移動到安全區域內,然后點擊 “釋放抱閘“。等待頁面左上角顯示“正常模式”,機器人可正常使用。
2.3. 關閉碰撞檢測功能
底部狀態欄中設有菜單快捷鍵,點擊

將出現一個彈框

● 機器人撞機后由于和外部接觸一直反饋一定的扭力,機器人會一直報警碰撞檢測。關閉碰撞檢測后,可將機器人點動移開。移動前必須確認移動方向是遠離撞機點,防止造成二次傷害損壞關節的電機或減速機。建議優先考慮使用“反向驅動”。
3. 常見問題解答
● 開啟反向驅動后,電機釋放抱閘機器人對應關節,此時關節在重力的作用下,會正常下滑。開啟反向驅動前,必須做好安全防護,防止由于重力向下移動損壞設備。
● 關閉碰撞檢測時,必須盡可能減小機器人的運動速度移出碰撞區域,以避免不可預知的碰撞損傷。解決后需把碰撞檢測開啟。


























