CS機器人IO高級配置插件
1. 簡介
目前CS的IO狀態(tài)輸出與輸入僅包括任務(wù)運行時狀態(tài)的關(guān)聯(lián)與控制,用戶如果需要跟蹤一些報警信息等狀態(tài),目前已有的功能無法實現(xiàn),不夠便利。為了滿足用戶一些相對定制化的需求,并且盡量少的改動已有功能,考慮開發(fā)一款獨立的IO配置插件,用于滿足更加豐富的IO擴展配置。
2. 操作流程
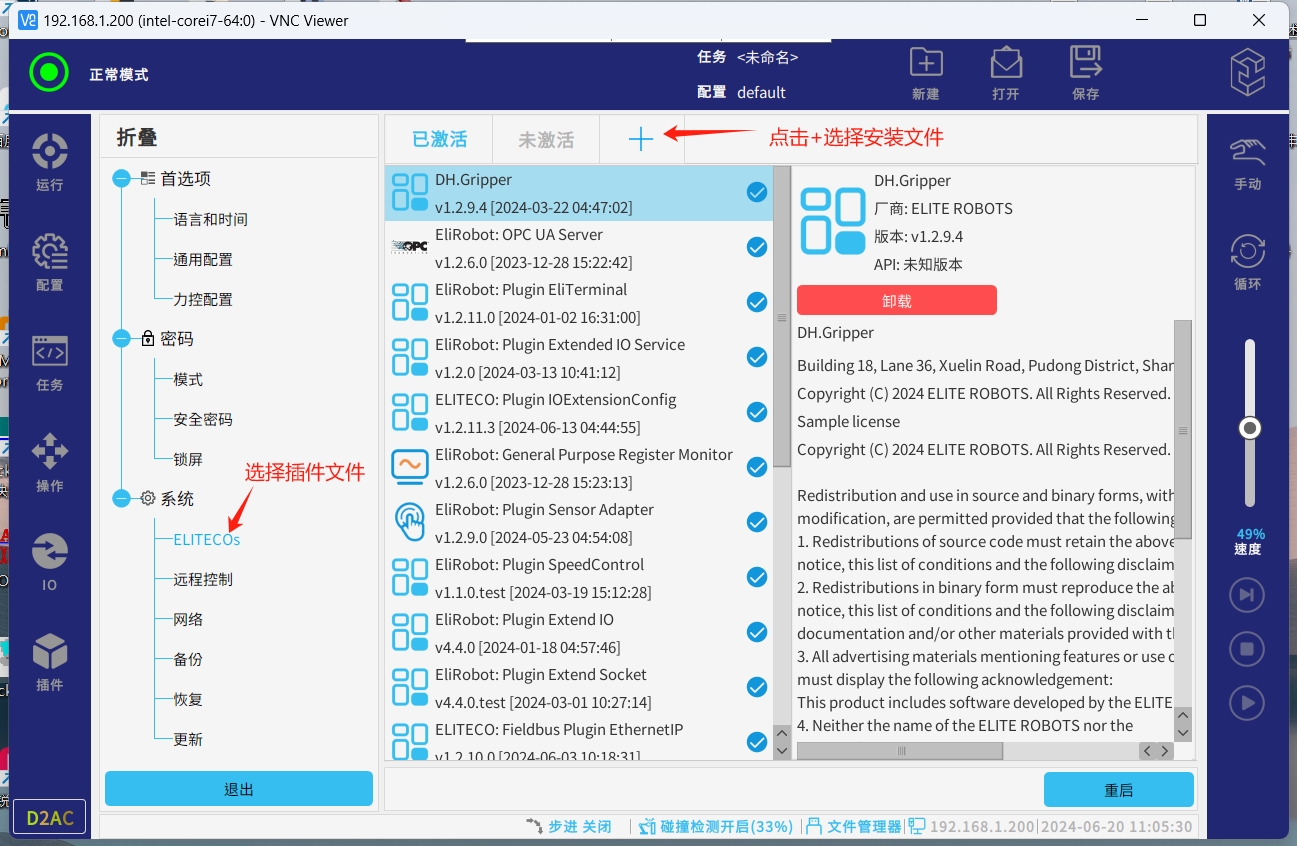
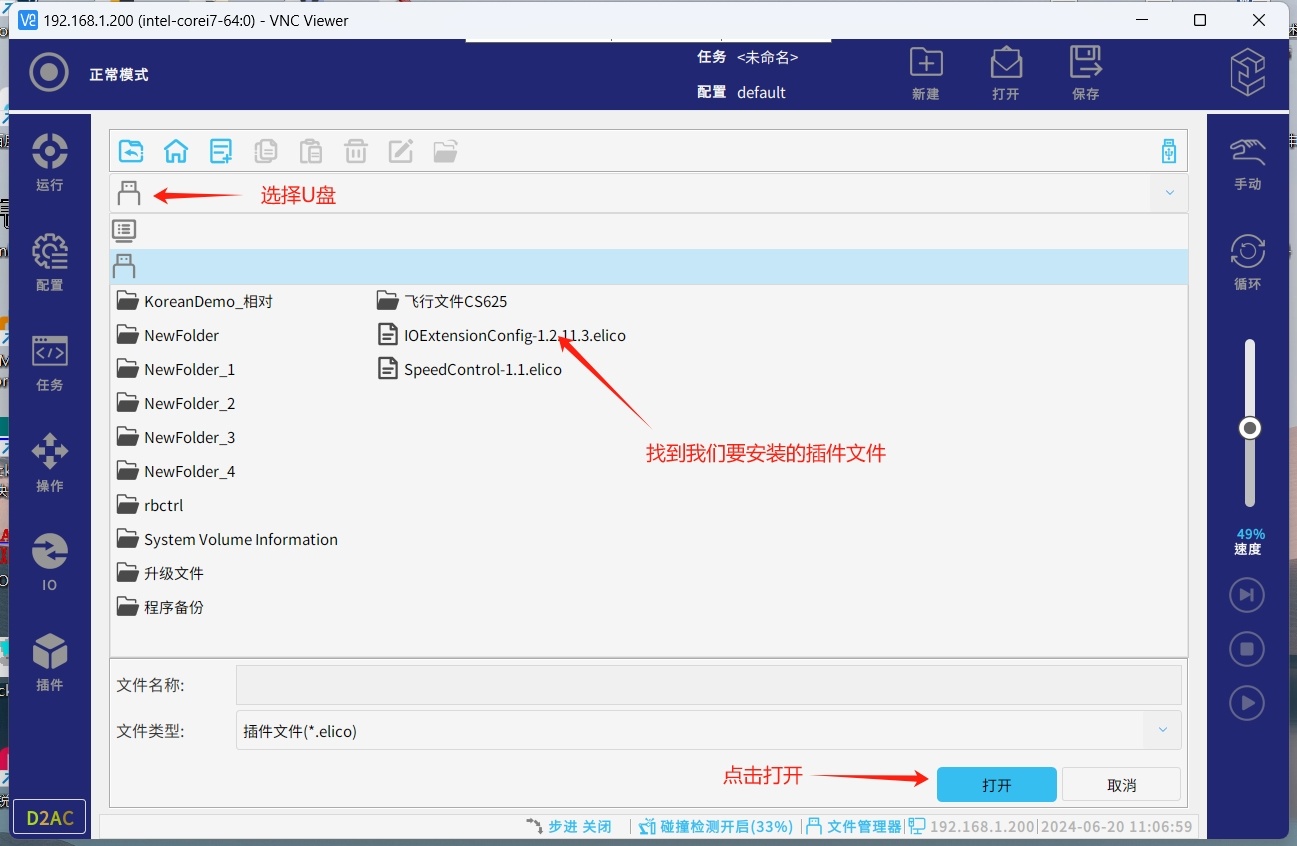
2.1插件安裝

● 將獲取到的插件文件放置到U盤內(nèi),并將U盤接入機器人USB接口,按照下方操作安裝IOExtensionConfig插件。
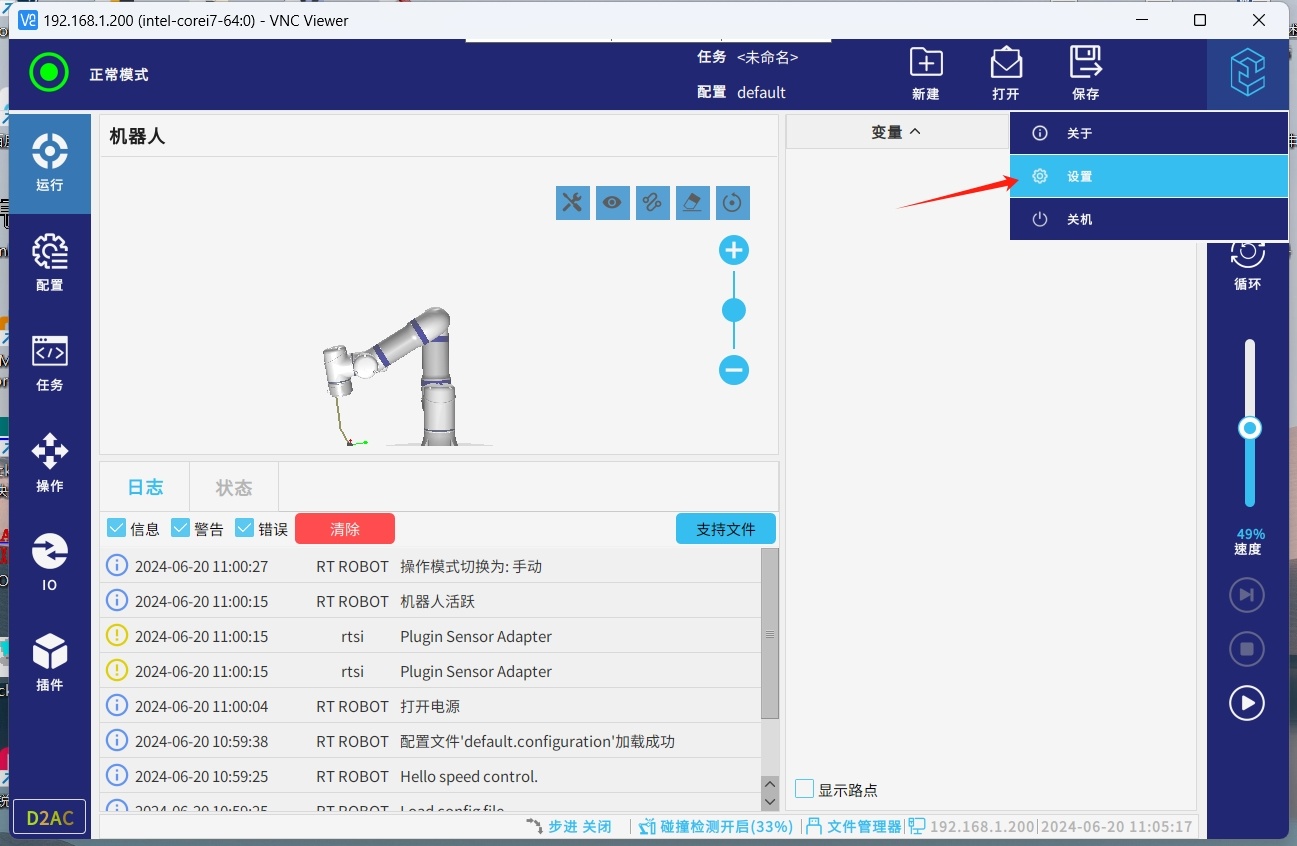
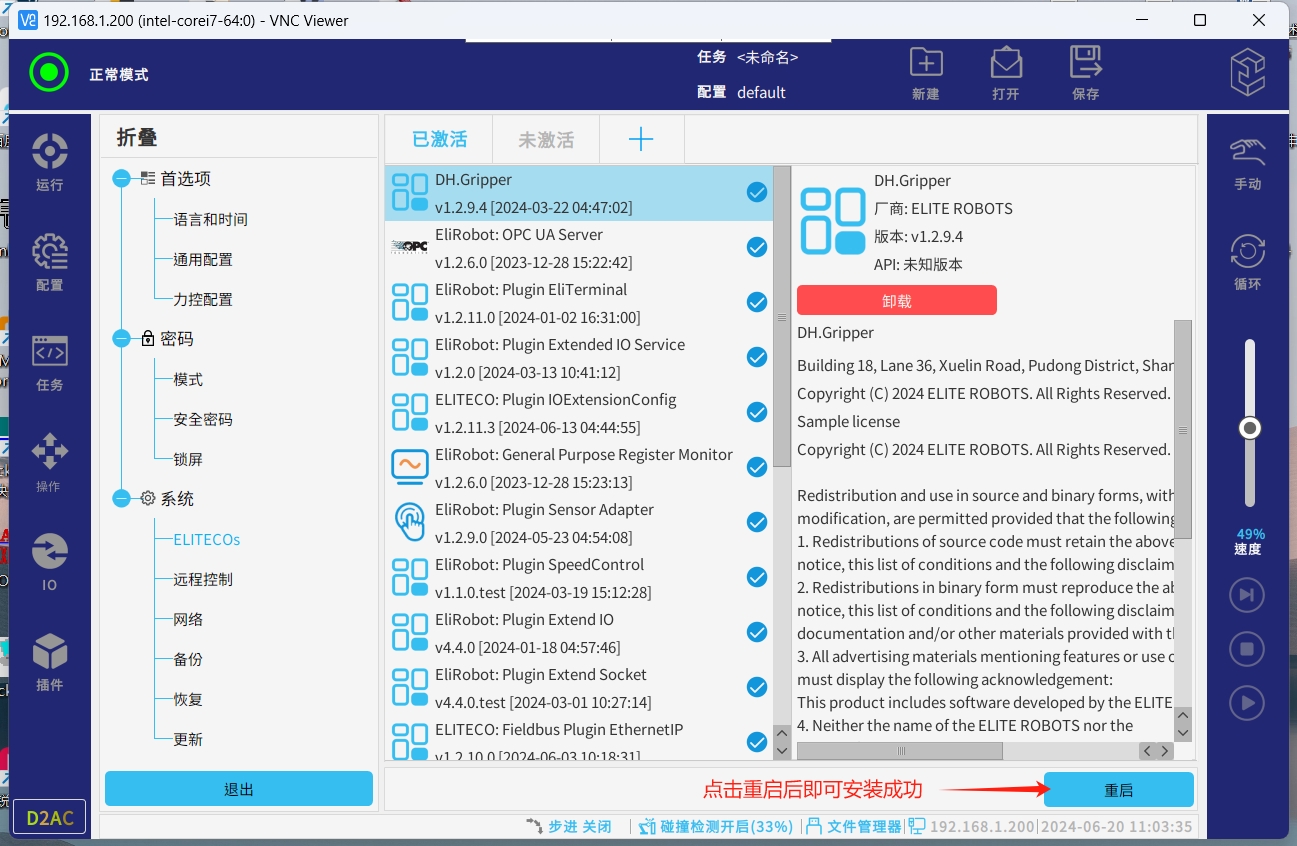
2.2插件使用
安裝成功后進入配置,插件,IO高級配置,就可配置對應(yīng)的IO來觸發(fā)對應(yīng)的功能或者綁定對應(yīng)的IO來接收機器人的狀態(tài)變化。
功能介紹:
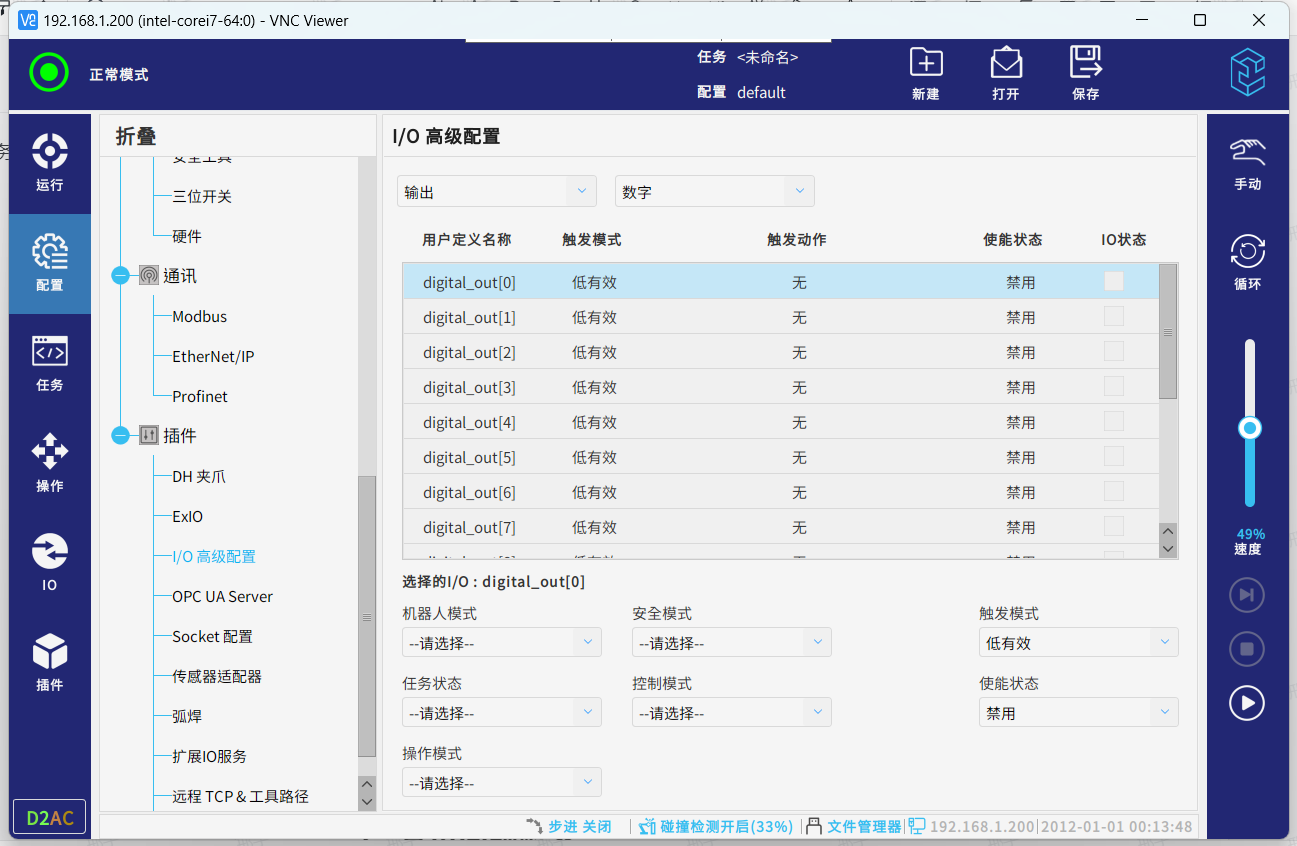
關(guān)于IO輸出狀態(tài)綁定:
● 支持數(shù)字IO、工具IO、可配置IO、MODBUS、布爾寄存器(修改名稱使用)。
● 支持綁定機器人模式(上電狀態(tài),電源關(guān)閉,抱閘以釋放等)
● 支持機器人安全模式綁定(正常模式,縮減模式,機器人緊急停止等)
● 支持任務(wù)運行狀態(tài)綁定(任務(wù)運行中、任務(wù)已停止、任務(wù)已暫停等)。
● 支持控制模式狀態(tài)綁定(遠程模式、本地模式、未配置等)。
● 支持操作模式狀態(tài)綁定(本地模式、遠程模式、未配置等)。
● 支持綁定狀態(tài)高低電平設(shè)置(即可以設(shè)置有效時為高或者有效時為低)。
● 支持該IO配置項的(使能狀態(tài))也即啟用與禁用。
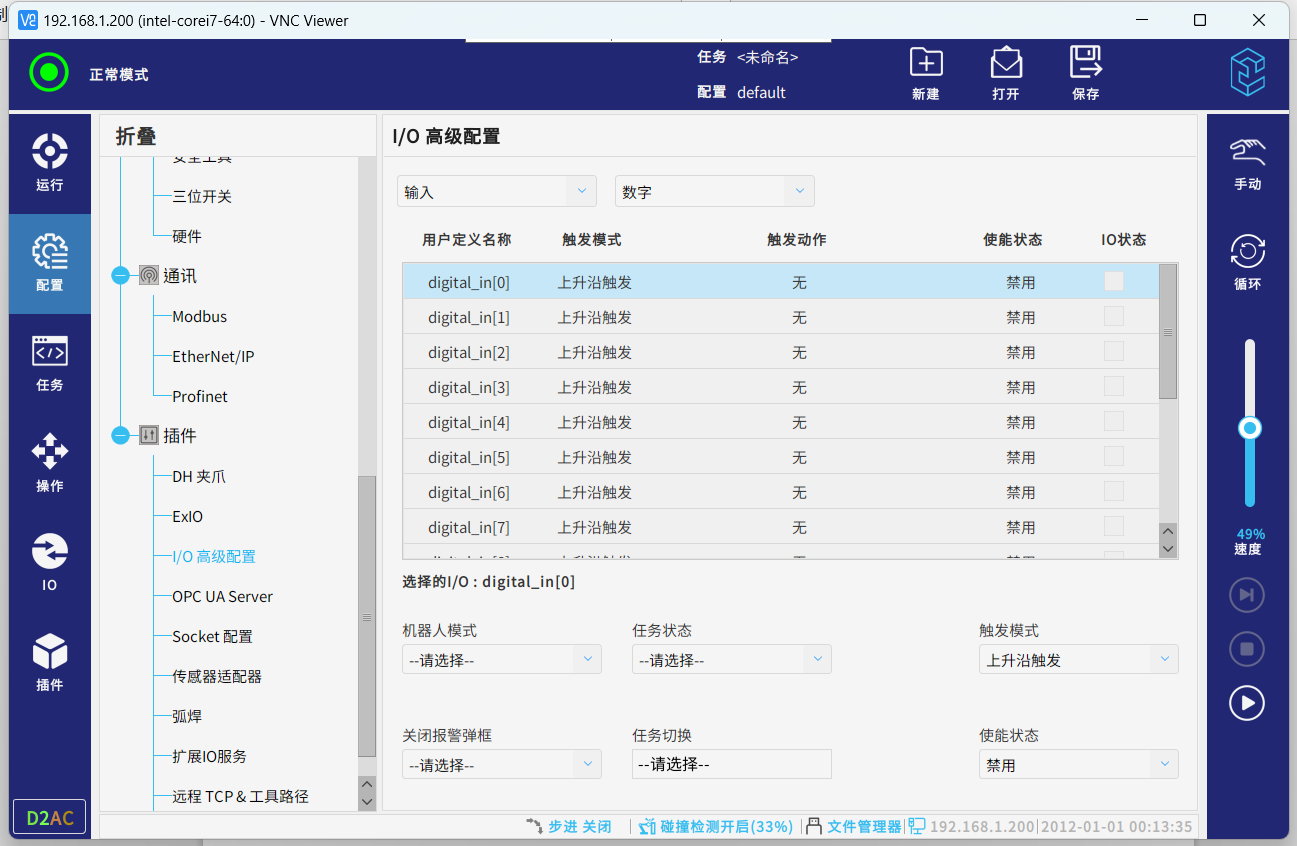
關(guān)于IO輸入狀態(tài)綁定:
● 支持數(shù)字IO、工具IO、可配置IO、MODBUS、布爾寄存器(修改名稱使用)。
● 支持機器人上電、機器人下電、釋放抱閘、解除保護性停止功能等。
● 支持機器人關(guān)閉保護性停止彈出框。
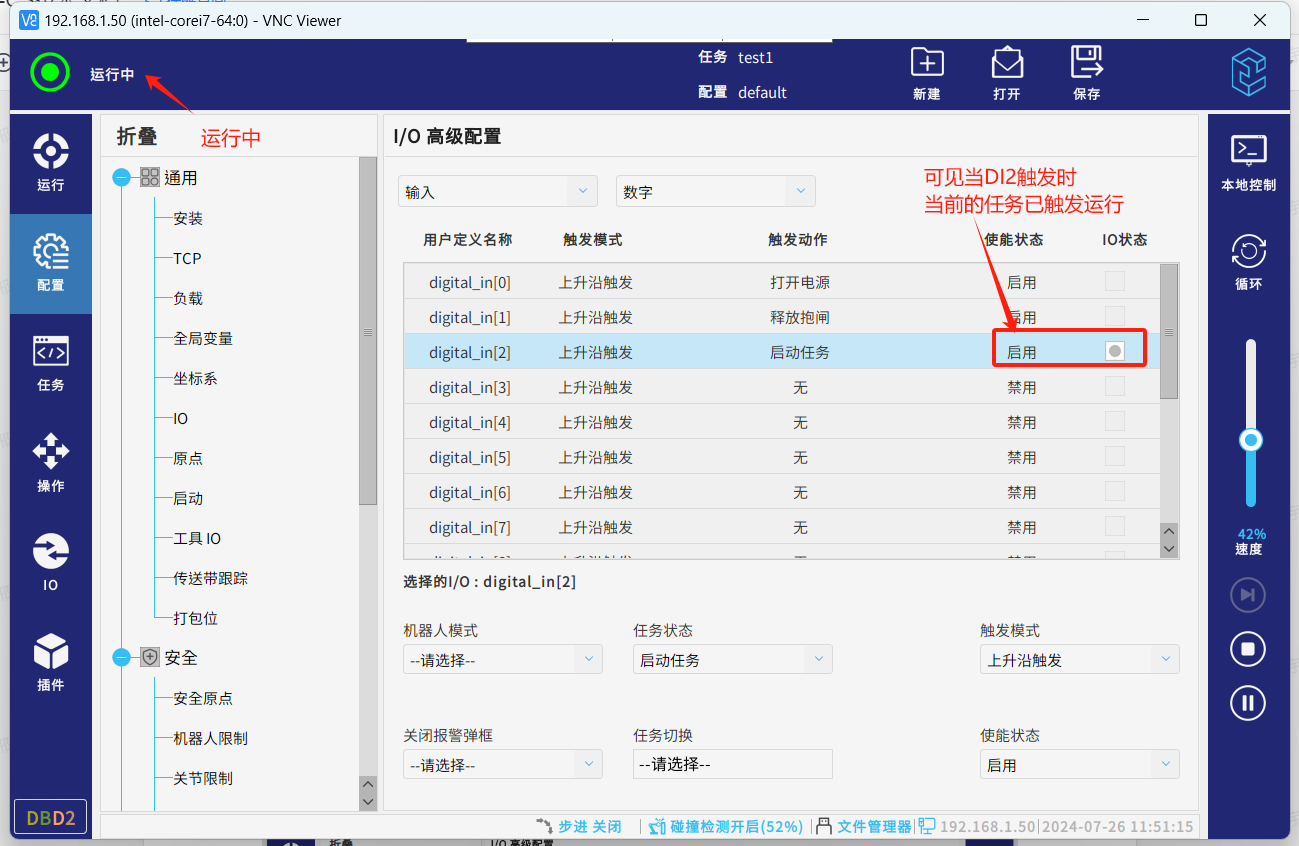
● 支持任務(wù)狀態(tài)控制(啟動任務(wù)、停止任務(wù)、暫停任務(wù)等)。
● 支持觸發(fā)模式設(shè)置(即上升沿觸發(fā)、下降沿觸發(fā)、高電平狀態(tài)觸發(fā)、低電平狀態(tài)觸發(fā)等)。
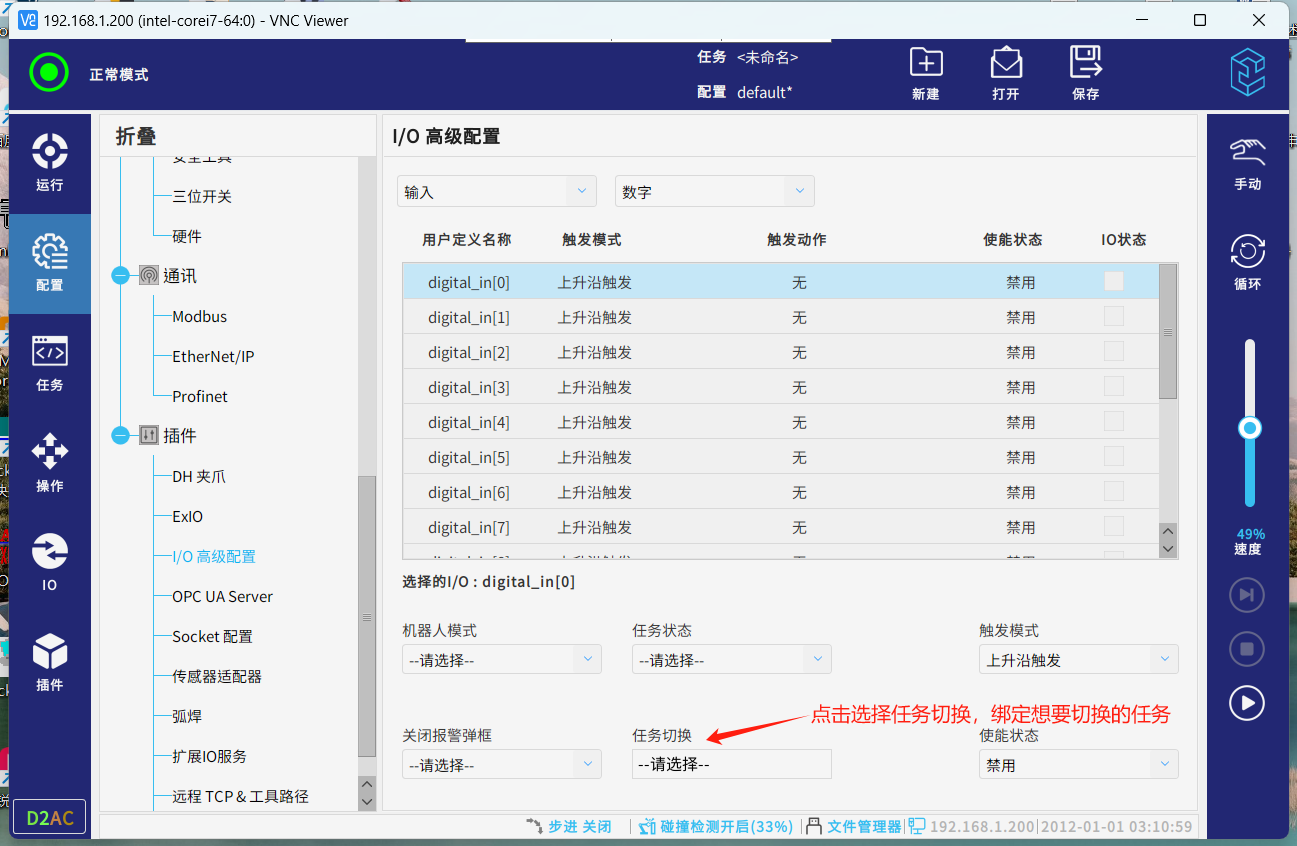
● 支持任務(wù)切換功能,綁定對應(yīng)IO后,觸發(fā)IO自動切換對應(yīng)的任務(wù)程序和任務(wù)程序所處的配置。(被動切換任務(wù)所對應(yīng)的配置)
● 支持該IO配置項(使能狀態(tài))也即啟用與禁用與僅遠程模式生效用于保證本地控制的安全性。
3. 示例
3.0關(guān)于IO啟動時序示例
● 設(shè)置綁定完成后保存配置

● 設(shè)置完成后可發(fā)現(xiàn)機器人處于關(guān)閉電源時,對應(yīng)的DI0已觸發(fā),機器人從關(guān)閉電源狀態(tài)切換至待機狀態(tài)。
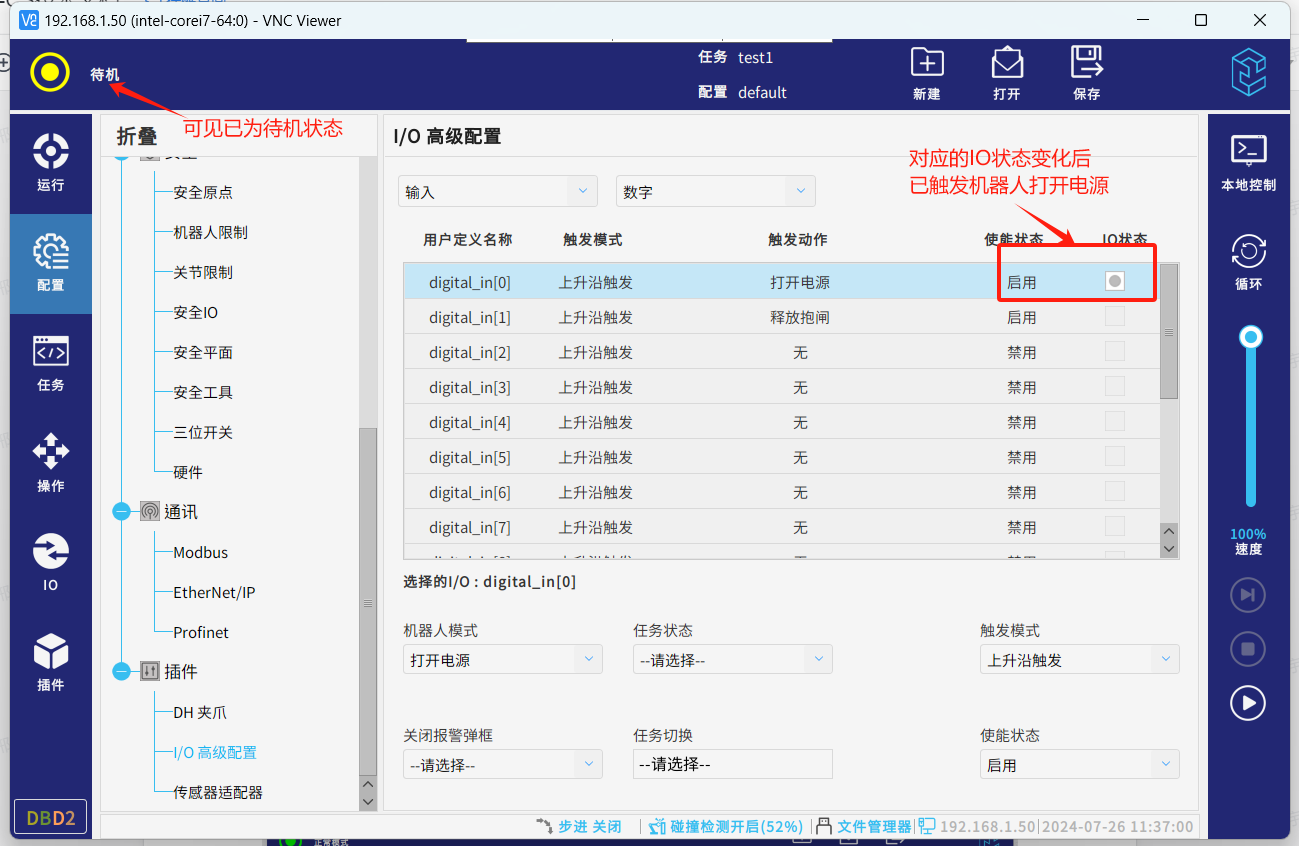
● 對應(yīng)的DI1已觸發(fā),機器人從待機狀態(tài)切換至正常狀態(tài)。
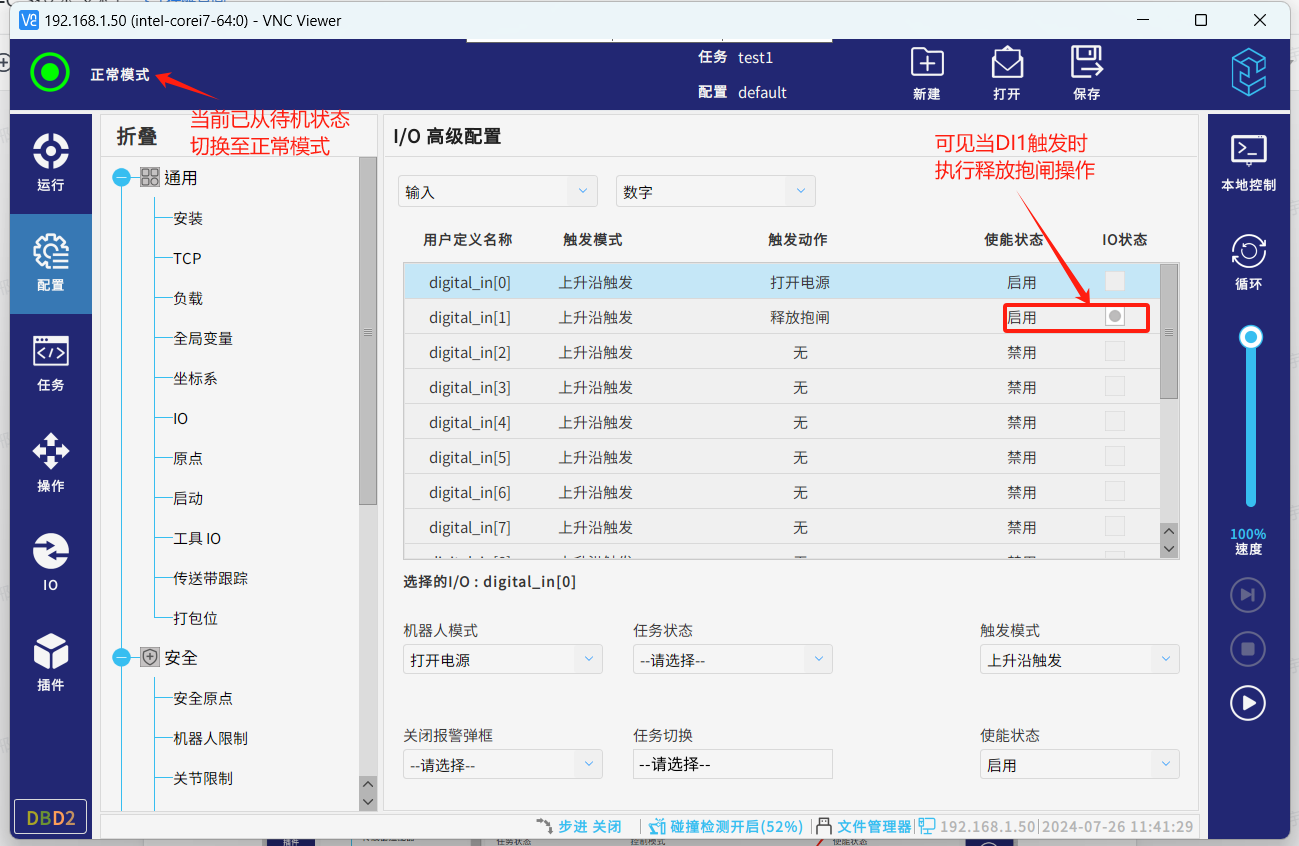
● 正常狀態(tài)下可以手動移動機器人或者直接觸發(fā)機器人運行已有的程序。
3.1關(guān)于IO輸出狀態(tài)綁定示例
● 設(shè)置綁定完成后保存配置
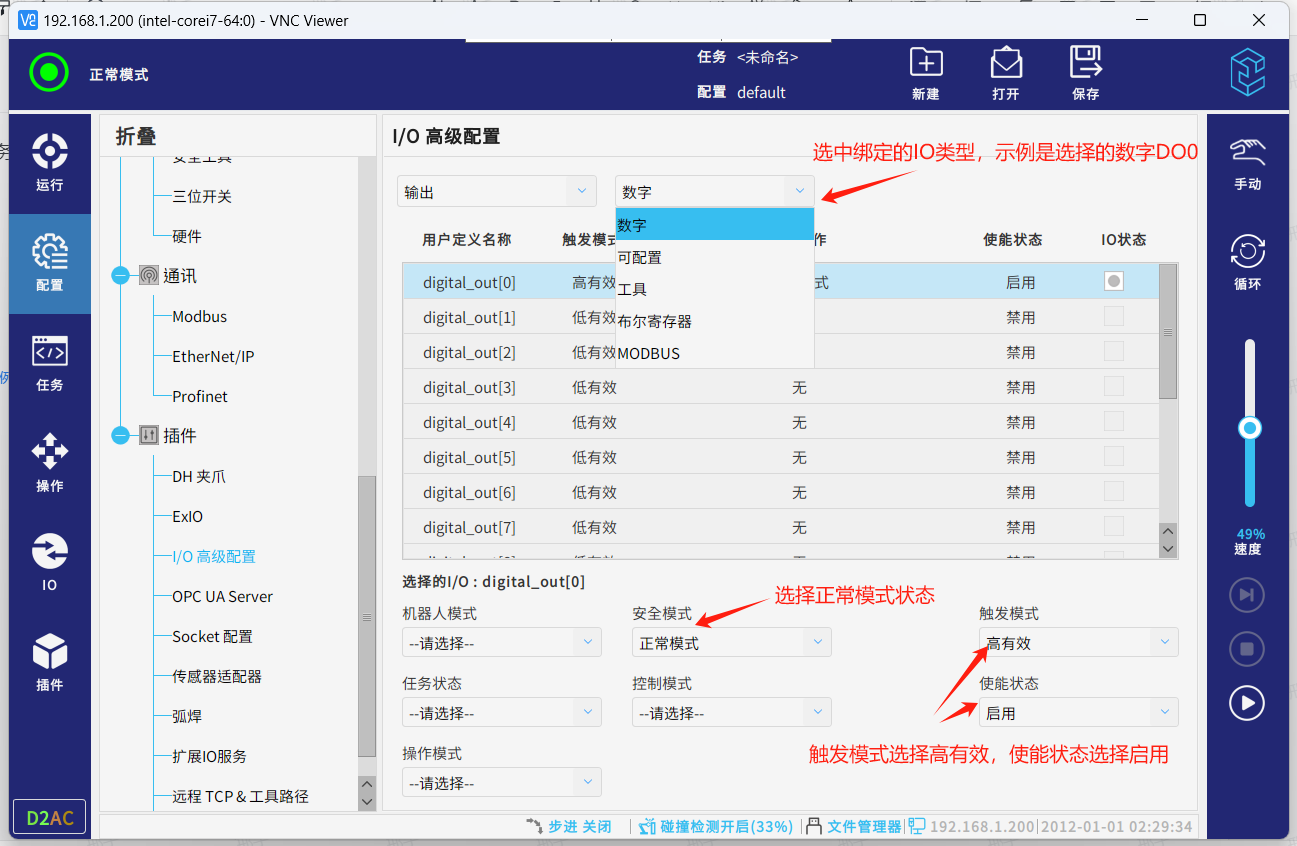
● 設(shè)置完成后可發(fā)現(xiàn)機器人處于正常模式時,對應(yīng)的DO0已觸發(fā)。
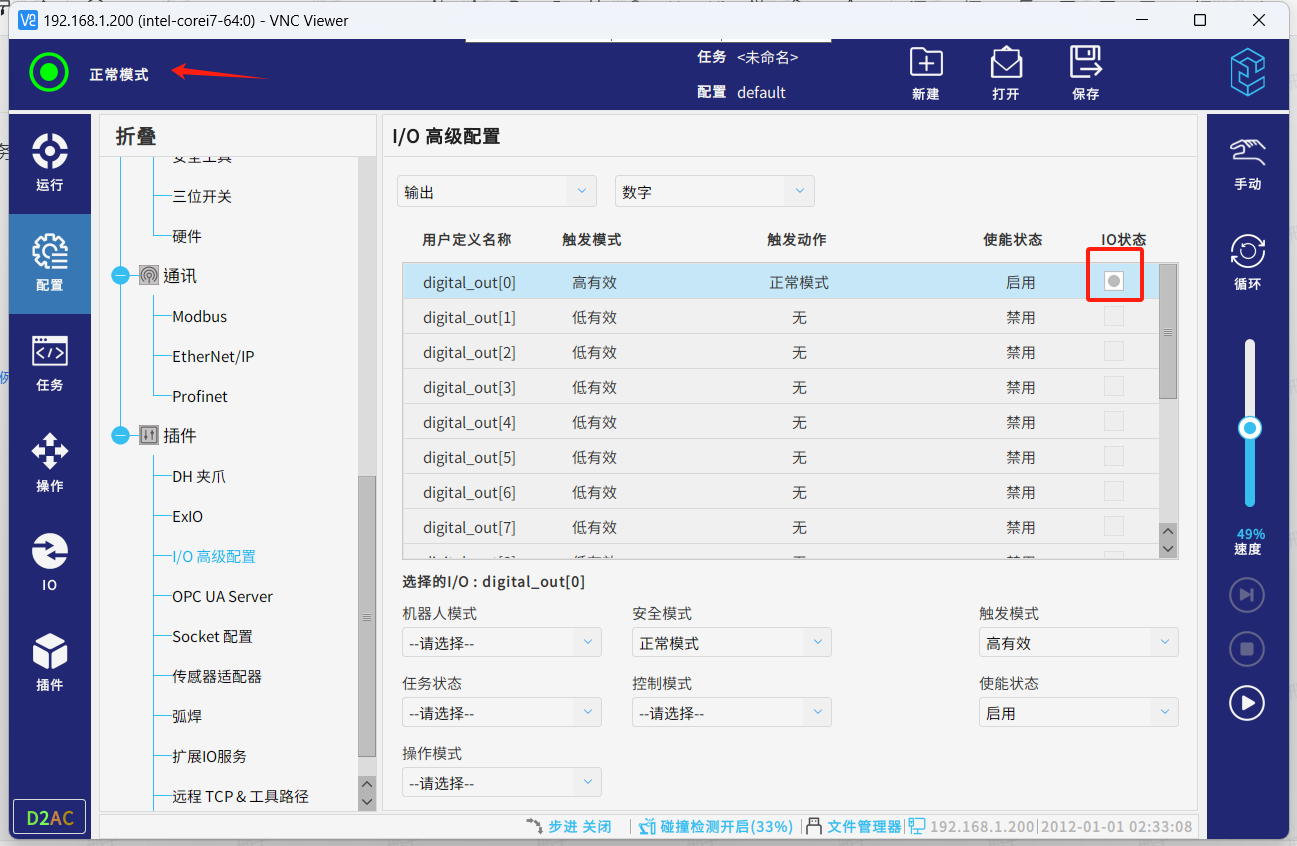
● 機器人處于其他狀態(tài)下,對應(yīng)的DO0恢復(fù)。

3.2關(guān)于IO輸入狀態(tài)綁定示例
● 綁定任務(wù)切換功能,選定任務(wù)后,保存配置。
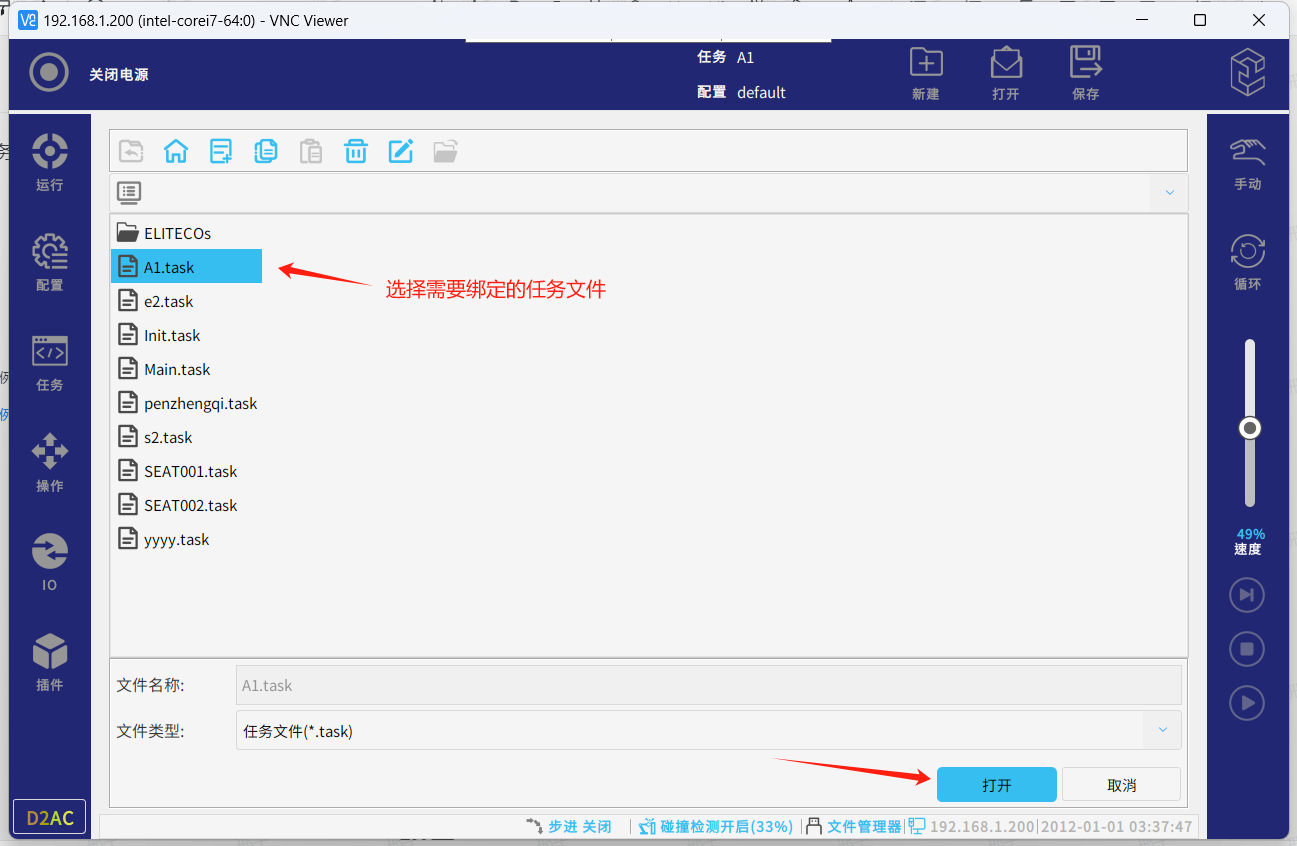
● 配置完成后保存配置。

● 觸發(fā)輸入信號后可見,綁定的任務(wù)從s2切換到A1。
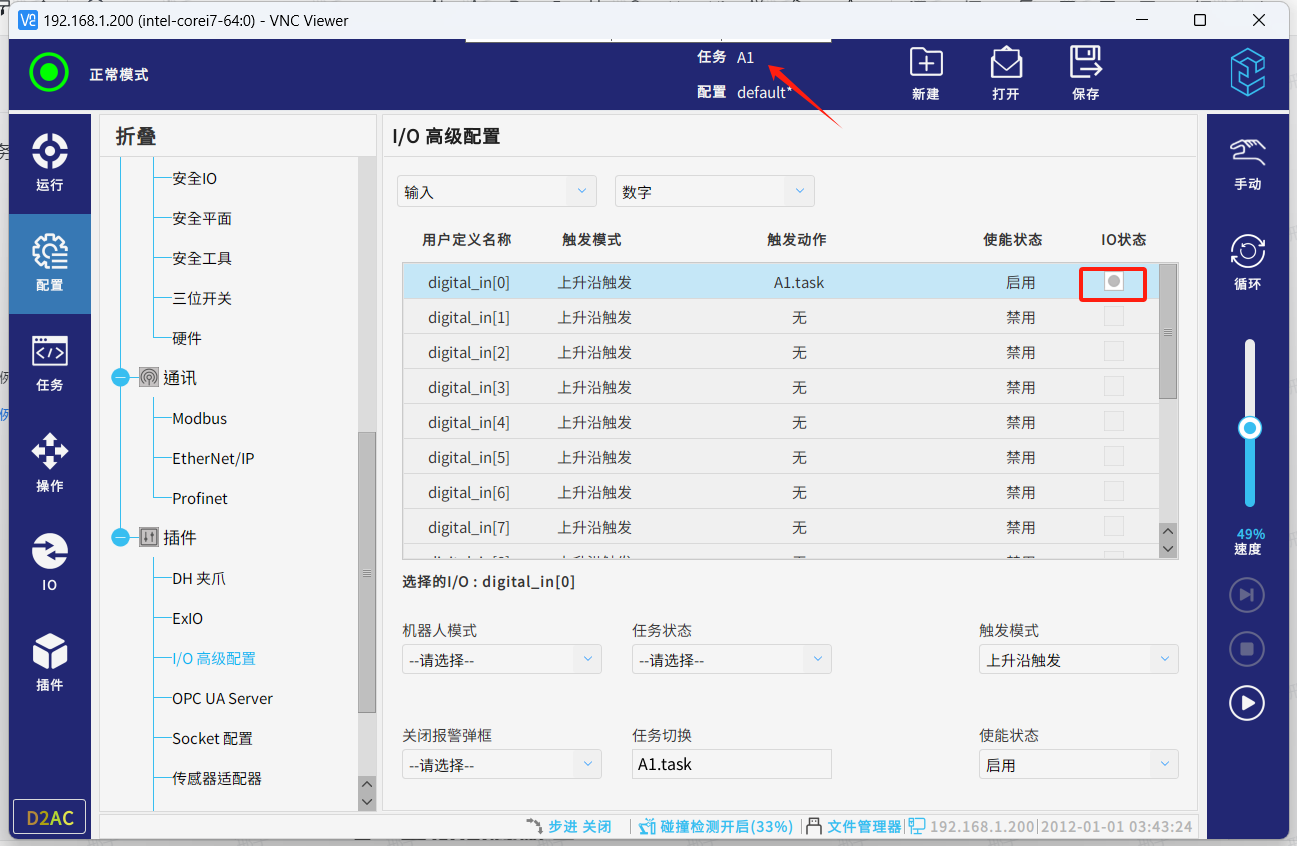
注:不同配置下的任務(wù),在切換時也會連同配置一起切換,但要注意的是在切換不同配置下的任務(wù)時,機器人會下電。
4. 常見問題解答
4.1 高級配置插件IO設(shè)置失敗: